MITSUBISHI RV-2F · ROBOTICKÁ MANIPULACE
PROCES
PROCES
UCHOPENÍ
VAKUOVÁ PŘÍSAVKA
SEKVENCE / 4 KROKY
▶ AKTIVNÍ PROTOKOL
SEKVENCE / 4 KROKY
▶ AKTIVNÍ PROTOKOL
01
STANDBY
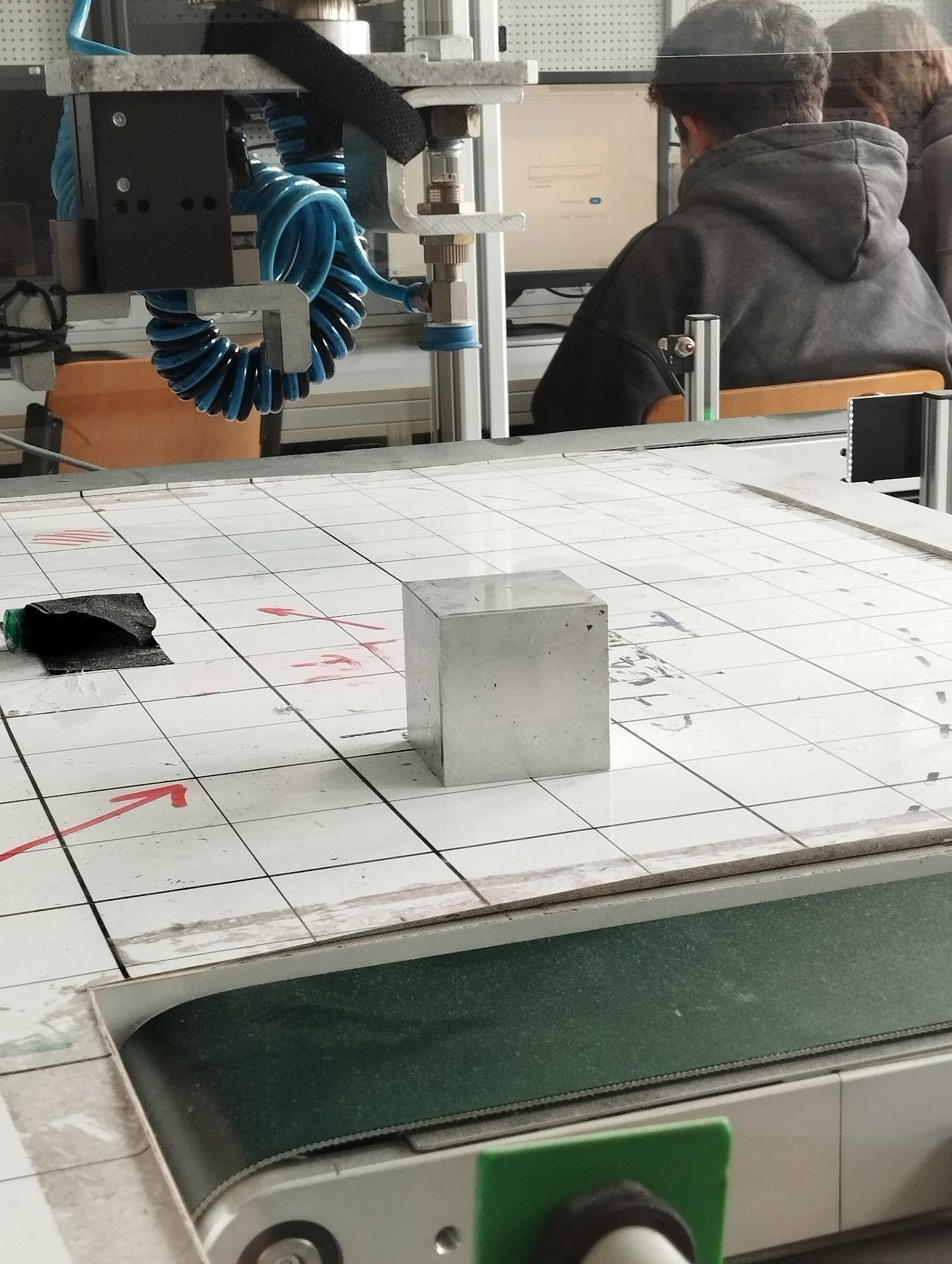
Robot je ve výchozí poloze. Rameno Mitsubishi je nastaveno tak, aby přísavka nevstupovala do pracovního prostoru kostky. Vakuový systém je neaktivní.
VAKUUM 0 kPa
KONTAKT NE
FÁZE INIT
02
MOVING
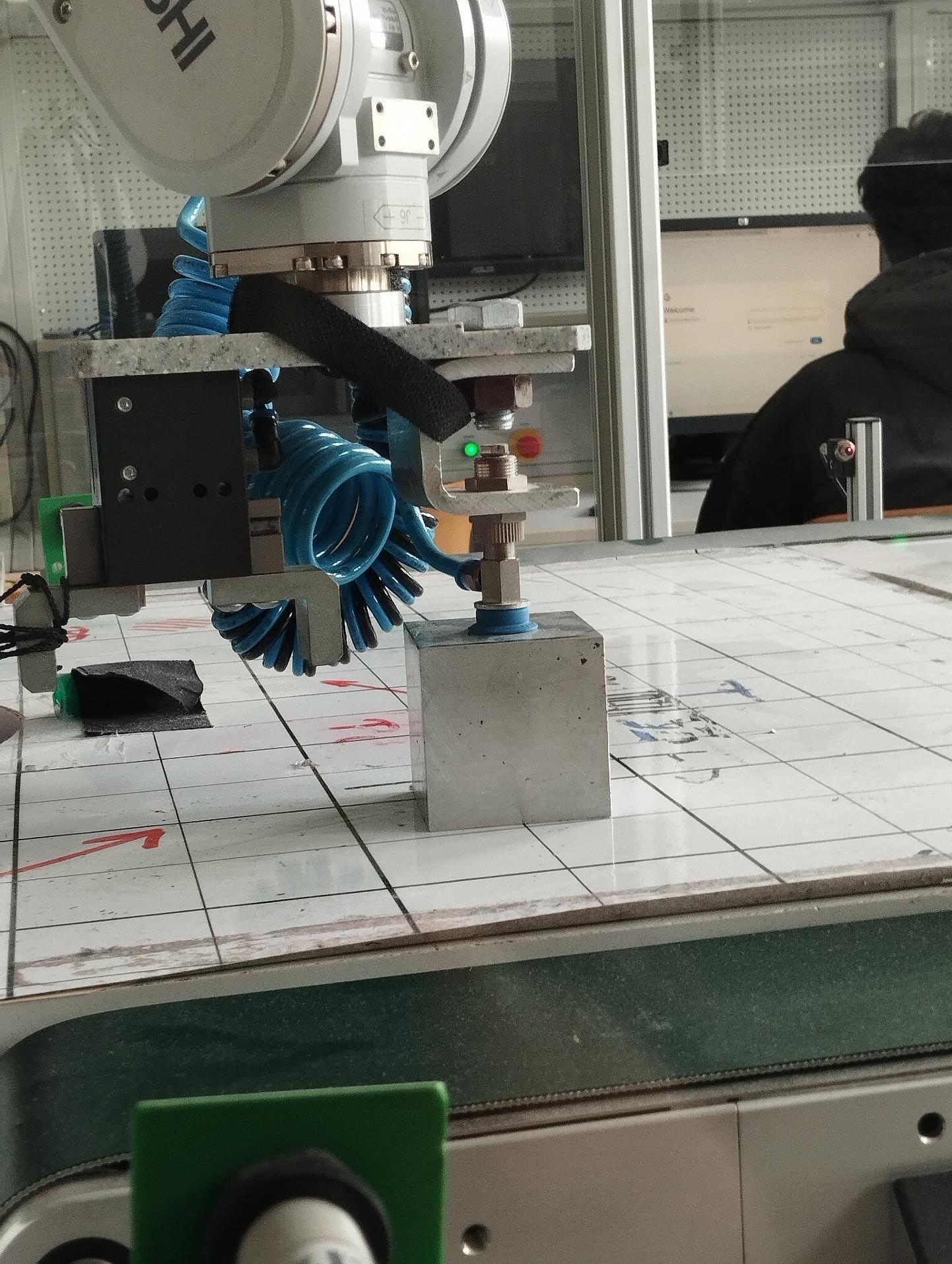
Robotické rameno provádí naváděcí pohyb. Přísavka se pohybuje přesně po definované trajektorii směrem k horní ploše kovové kostky na pracovním stole.
VAKUUM 0 kPa
RYCHLOST LOW
FÁZE APPROACH
03
GRIPPING
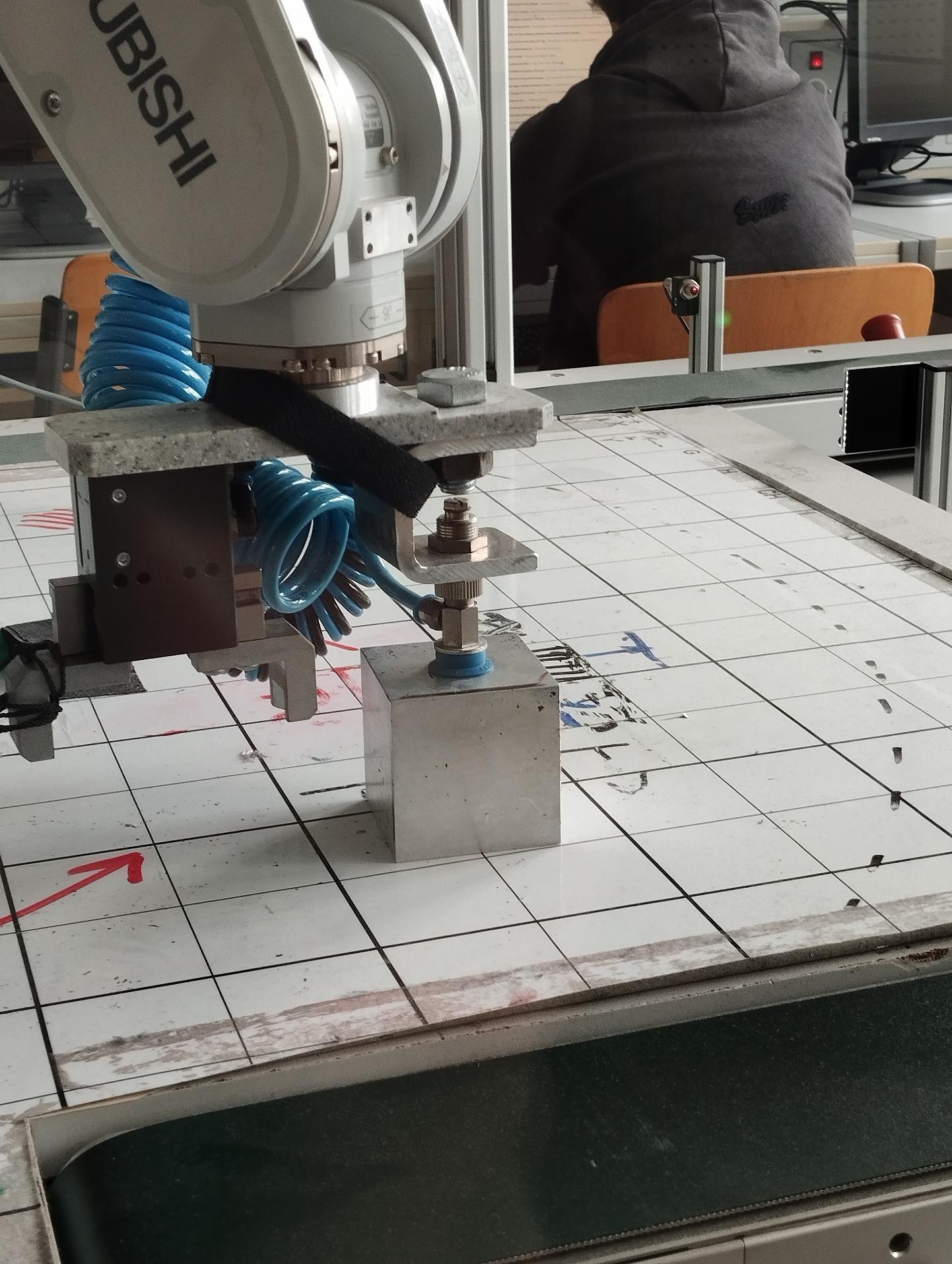
Přísavka dosedá na horní plochu kostky. Vakuový generátor aktivuje podtlak – přísavka vytváří hermetické těsnění se surface kostky a drží ji pevně.
VAKUUM −60 kPa
KONTAKT ANO
FÁZE GRIP
04
LIFTING
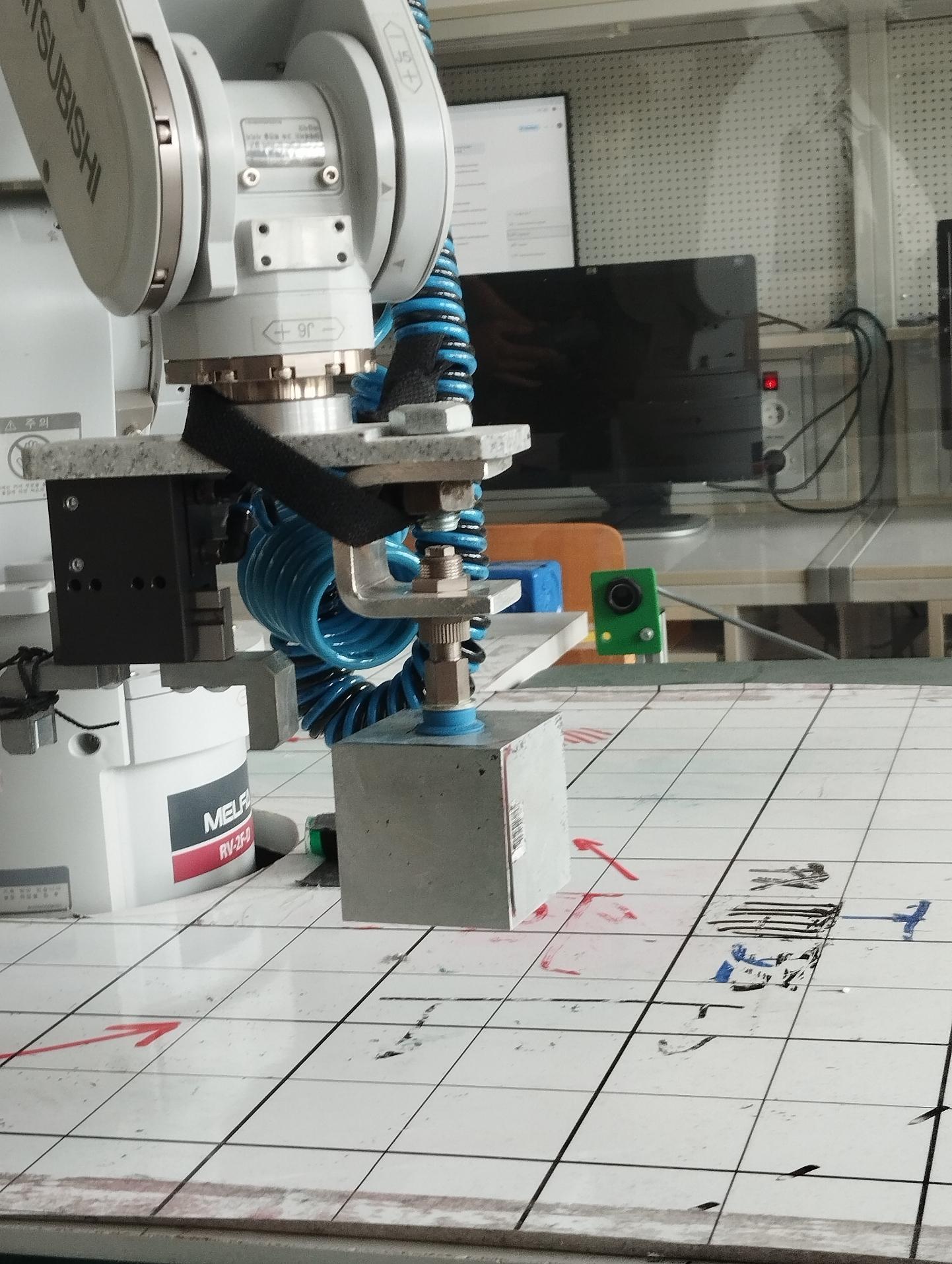
Robot zdvíhá kostku do výšky. Vakuové přichycení drží stabilně po celou dobu pohybu. Rameno je připraveno přenést kostku na cílovou pozici.
VAKUUM −60 kPa
ZATÍŽENÍ PLNÉ
FÁZE LIFT